

 联系我们
联系我们

将外轴的位安排转换为异步方式,就是将外轴的同步和异步方式进行切换
示例应用程序:$ ASYNC_AXIS = ' b1000 '
从右到左,表示外轴1 2 3 4。以上例子表明,外轴4的运行模式为异步模式,其余为同步模式。
此指令不能放置在中断程序和SPS程序中。
OV_ASYNC美元
异步外部轴的乘法器,表示外部轴异步移动的速度。这必须是安全的,不容易控制,它不会像你想的那么快。
ASYNC_STATE美元
异步轴运动的状态
#忙,异步移动激活
取消,异步移动未激活或挂起。*之后的异步移动已被ASYCANCEL取消。
空闲,异步运动未激活或挂起。在*之后的异步移动没有被ASYCANCEL取消。
#PEND,异步运动由ASYSTOP暂停。
ASYPTP
外轴异步运动命令,不能使用轨迹逼近。它可以用于SPS程序。
移动缓冲区*多可以有三个ASYPTP动作。
例如:ASYPTP {E1 100.0}, E1轴移动到100°位置。
1. 连接机器人,下载项目并激活它。

2. 添加硬件。


3.参数配置及外轴参数修改。

4. 添加文件。右击


5. 添加文件

6、修改文件 ,第七轴需要添加下图程序块。
,第七轴需要添加下图程序块。
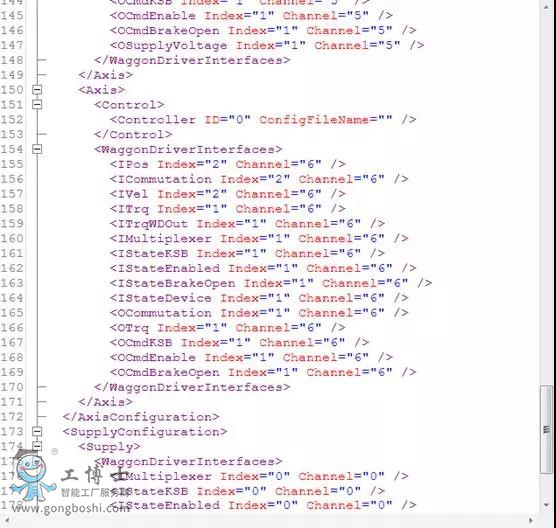
7、修改文件 ,第七轴需要添加下图程序块。
,第七轴需要添加下图程序块。

8、修改文件 ,第七轴需要添加下图程序块。
,第七轴需要添加下图程序块。

更多信息请点击:库卡机器人